An assurance case is strong when its leaves are logs, tests, and replayable artifacts.
A Safety-Critical Controls Researcher
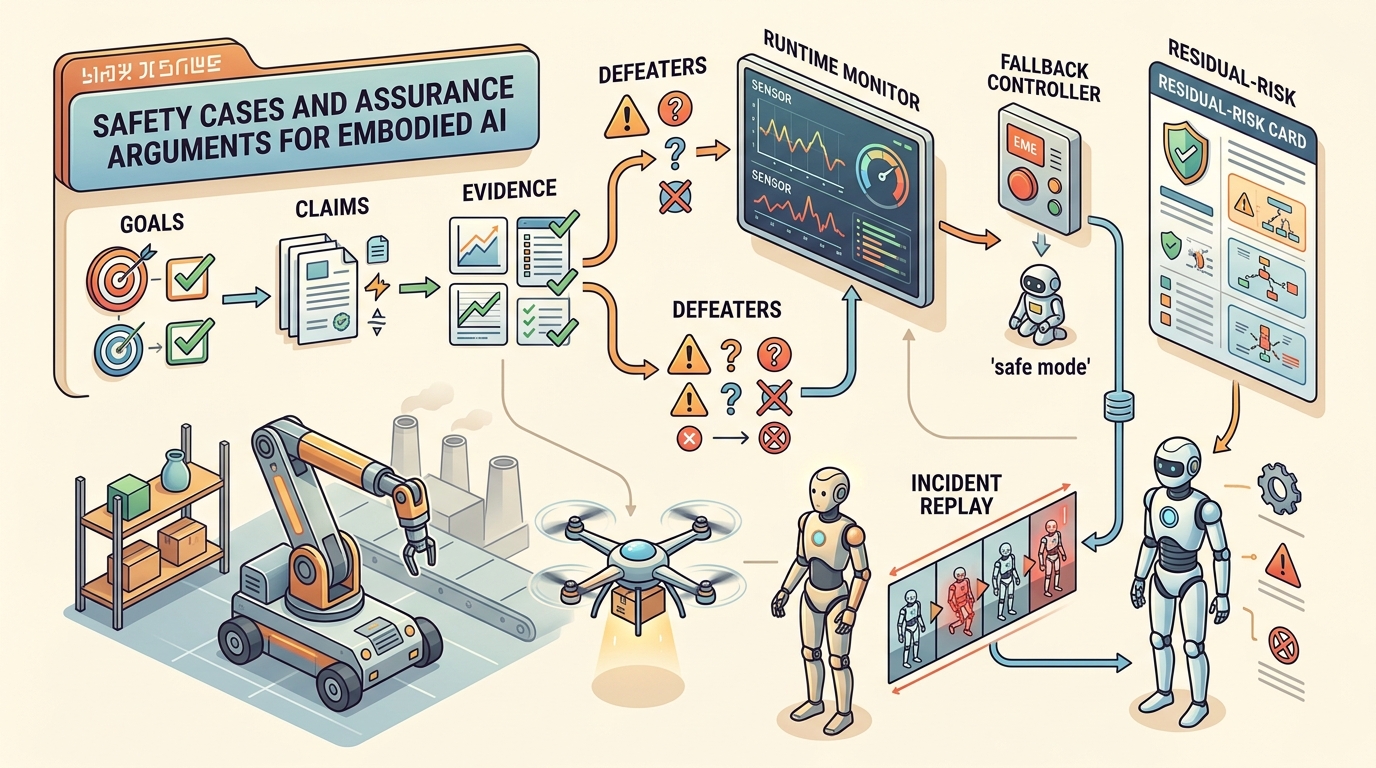
A safety case is the structured object that tells reviewers why the robot is acceptably safe for a bounded operating domain, what evidence supports that claim, and which defeaters would still break the argument.
Why This Matters
Safety Cases And Assurance Arguments For Embodied AI sits at the boundary between learning and safety engineering. The question is not whether the policy usually behaves well, but whether dangerous states are detected, blocked, or exited fast enough to protect people, equipment, and mission goals.
A concise assurance template is $$\mathcal{A} = (G, C, E, D, R),$$ where $G$ are goals or claims, $C$ the context and assumptions, $E$ the evidence, $D$ the defeaters or challenge conditions, and $R$ the residual risks and release restrictions.
The power of an assurance case is not that it looks formal. It is that every safety claim has to point to evidence, every evidence item has to fit a bounded context, and every open weakness has to be named.
- State the top-level claim about acceptable safety within a bounded operating domain.
- Decompose the claim into monitor, controller, human-override, and evidence subclaims.
- Attach concrete artifacts: logs, benchmark manifests, hazard analyses, and replay cases.
- List defeaters such as stale calibration, untested weather, or unsupported task variants.
- Publish residual risk and rollback rules together with the approval boundary.
Worked Example
A warehouse robot may have a strong safety case for marked indoor aisles with trained operators and capped speed, yet a weak case for mixed public spaces. The assurance argument keeps those domains distinct instead of letting success in one imply readiness in the other.
from dataclasses import dataclass, asdict
@dataclass
class AssuranceCard:
claim: str
context: str
evidence: list[str]
defeaters: list[str]
residual_risk: str
def as_row(self) -> dict[str, object]:
return asdict(self)
card = AssuranceCard(
claim="Robot is acceptably safe for marked indoor aisles under supervised operation.",
context="Indoor warehouse, capped speed, trained operators, no public interaction.",
evidence=["hazard_log_v3", "override_campaign_v2", "matched_panel_eval_v5"],
defeaters=["camera_calibration_stale", "unvalidated_public_spaces"],
residual_risk="Minor contact remains possible during rare localization degradation."
)
print(card.as_row()){'claim': 'Robot is acceptably safe for marked indoor aisles under supervised operation.', 'context': 'Indoor warehouse, capped speed, trained operators, no public interaction.', 'evidence': ['hazard_log_v3', 'override_campaign_v2', 'matched_panel_eval_v5'], 'defeaters': ['camera_calibration_stale', 'unvalidated_public_spaces'], 'residual_risk': 'Minor contact remains possible during rare localization degradation.'}Expected output: The output is useful because every field has a review function. If the card lacks context, the claim is overbroad; if it lacks defeaters, the argument is not honest enough to guide safe release.
Structured safety-case templates, hazard logs, incident replay archives, and review dashboards reduce the odds that key assumptions remain trapped in meeting notes or memory.
Assurance arguments are useful only when each claim points to an inspectable artifact. Hazard logs define the claim scope, FMEA tables rank residual risk, runtime filters provide mechanism evidence, ROS 2 traces show operational authority, and GSN-style templates keep the argument navigable.
Assurance arguments work best when they are maintained artifacts rather than one-time documents. Every new monitor, hardware change, or deployment context should update the case, not sit outside it.
The section's concrete stack is an assurance graph whose leaves are logs, replay files, test panels, solver manifests, and review records. Empty leaves identify the safety claims that are not ready for deployment.
The biggest failure mode is rhetorical assurance: a document full of confident claims with no artifact-level traceability. In embodied AI, a safety case that cannot point to logs and replay files is mostly ceremonial.
Cross-References
This section consolidates formal safety envelopes, runtime shields, override evidence, and approval gates into one release artifact. The approval tuple from Section 54.6 (ODD, evidence, defeaters, residual risk, rollback) maps directly onto the $\mathcal{A} = (G, C, E, D, R)$ template here: the ODD becomes the context $C$, the evidence items become leaves of $E$, and the named residual risks become the $R$ entries that a release board must explicitly accept. It also prepares the operational focus of Chapter 55.
Write an assurance card for one embodied system with a bounded domain, three evidence items, two defeaters, and one residual-risk statement. Then try to defeat your own argument by proposing a domain expansion.
Do not let the assurance case quietly broaden when the product scope expands. A good safety case narrows claims precisely; a bad one grows vague as deployment pressure rises.
For drones, the assurance case may name altitude ceiling, geofence, link quality assumptions, and return-to-home behavior. For humanoids, it may focus on human proximity, fall risk, and whole-body intervention authority.
Open work includes machine-readable safety cases, tighter integration with fleet telemetry, and methods for updating assurance arguments when learning-enabled systems evolve after release.
Can you point from each major safety claim to one concrete artifact and one defeater? If not, the assurance case is not yet doing its job.
Safety cases turn a collection of tests and mitigations into a reviewable deployment argument. They are where technical evidence becomes operational permission.
Draft one assurance argument for a learned robot policy, including claim decomposition, evidence links, defeaters, and a rule for when the argument must be rebuilt after system changes.
An assurance case with no defeaters listed is not an honest argument. It is a wish dressed in structured notation, and reviewers with good questions will find the missing branches faster than you expect.
Section References
UL 4600 overview. https://users.ece.cmu.edu/~koopman/ul4600/index.html
A useful anchor for autonomous-system assurance structure.
ISO 21448 SOTIF overview. https://www.iso.org/standard/77490.html
Useful for discussing performance limitations and intended-functionality hazards.
UNECE R157 automated lane keeping systems. https://unece.org/transport/documents/2021/03/standards/un-regulation-no-157-automated-lane-keeping-systems-alks
A concrete example of structured operational restrictions and evidence obligations.
Chapter 55 continues from this assurance perspective and asks how deployment architecture should preserve logs, monitors, fallbacks, and update control over the full system lifecycle.