"A plan is only smart if the wheels, floor, people, and clock all agree to it."
A Local Planner With Commitment Issues
Field navigation under degraded sensing turns maps and goals into constrained motion. The planner is not searching for a pretty line; it is choosing a feasible commitment under geometry, dynamics, uncertainty, moving obstacles, and recovery rules.
Problem First
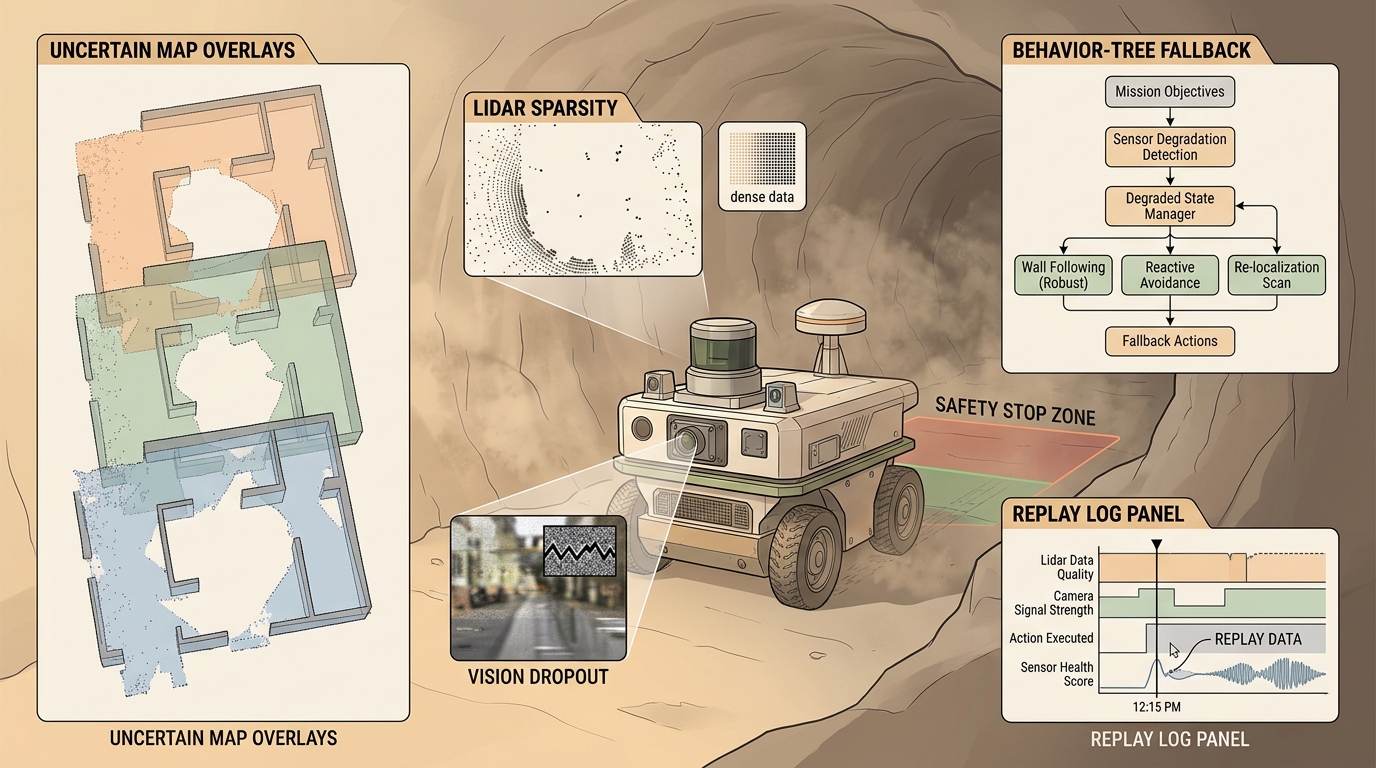
Field navigation starts when the assumptions break. Dust, darkness, wheel slip, GPS denial, glass, crowds, and map aging make the planner reason about confidence and fallback behavior.
The field stack must define degraded-mode policies before deployment. It should know when to slow down, switch sensors, request teleoperation, hold position, or retreat. Continuing without a confidence bound is not autonomy; it is unmanaged risk.
The best-looking route is not the best robot plan unless the controller can track it, the costmap reflects current hazards, and replanning has a defined trigger. Navigation quality is measured by executed motion, not only by path length.
Formal Model
Most navigation methods can be read as constrained search or optimization:
$$ u_t\in\mathcal U_{\mathrm{safe}}(b_t),\quad b_t=p(x_t,m,\text{hazards}\mid z_{\le t},u_{ The cost term names what the robot wants. The constraints name what reality permits: collision clearance, velocity and acceleration limits, curvature bounds, kinodynamic feasibility, perception confidence, and safety monitors. Code Fragment 1 isolates the planning idea in a tiny runnable example. The goal is not to replace Nav2 or OMPL; the goal is to make the invariant visible before the full stack absorbs it. Expected output interpretation. The selected action tells you which safety bound fired first: localization confidence fell below threshold before map age or clearance triggered their own fallback. In a field log, that distinction matters because the right operator question is not "why did it stop," but "which monitored assumption became invalid first." Nav2 behavior trees, lifecycle management, costmap filters, OpenVINS or RTAB-Map localization, and ROS bag replay give the practical backbone for degraded sensing tests. The shortcut is a maintained safety and replay stack plus a project-specific risk policy. Keep the small implementation as a regression test. Use the maintained stack for maps, costmaps, behavior trees, controllers, plugins, simulation replay, and deployment telemetry. Every planner in this chapter should be replayed with blocked corridors, moving obstacles, localization jumps, stale costmaps, actuator saturation, and recovery failure. A plan that only works in a clean static grid is a sketch, not an embodied system. A delivery robot should log global path, local command, costmap snapshot, controller error, nearest obstacle distance, replan count, and recovery action. Those fields separate a weak route planner from a bad local controller or an outdated perception layer. Before comparing planners, freeze the robot footprint, inflation radius, controller frequency, maximum velocity, acceleration limits, map resolution, and localization source. Otherwise the comparison silently mixes planner quality with robot configuration. A serious navigation report should also include a route replay, a costmap snapshot at the decision point, the exact recovery behavior that was enabled, and whether the final command respected the same kinodynamic limits used during planning. Frontier systems combine multimodal sensing, active perception, formal runtime monitors, and fleet-level failure mining. The hard research problem is making degraded-mode decisions explainable enough for safety review. A planner that ignores dynamics is a cartographer with excellent handwriting and no driver license. Can you state the search space, cost function, constraints, replanning trigger, controller interface, and failure metric for field navigation under degraded sensing? If not, the planner is not specified enough to deploy. Field navigation under degraded sensing is ready for embodied use when route quality, dynamic feasibility, local control, and recovery behavior are measured in the same replay. Create a three-scenario planning panel: clear route, blocked route, and dynamic obstacle. Report path cost, minimum clearance, replan count, controller saturation, and final mission outcome for the same robot model. Continue to Chapter 31: Language-Guided Embodied Agents, where this planning contract connects to the next embodied capability. LaValle, S. M. "Planning Algorithms." Cambridge University Press, 2006. http://lavalle.pl/planning/ Open textbook reference for graph search, sampling-based planning, configuration spaces, and kinodynamic planning. OMPL Project. "Open Motion Planning Library." Official documentation. https://ompl.kavrakilab.org/ Primary tool reference for sampling-based planners such as RRT, RRTstar, PRM, and kinodynamic variants. ROS 2 Navigation Project. "Nav2 documentation." Official documentation. https://navigation.ros.org/ Primary documentation for global planners, controllers, costmaps, behavior trees, and recovery behaviors.
Worked Diagnostic
# Select a degraded-mode response from confidence signals.
# The policy chooses the least risky action before full failure.
signals = {"localization": 0.42, "costmap_age_s": 3.8, "clearance_m": 0.31}
if signals["localization"] < 0.5:
action = "hold_and_relocalize"
elif signals["costmap_age_s"] > 2.0:
action = "slow_and_refresh_map"
elif signals["clearance_m"] < 0.35:
action = "stop_and_replan"
else:
action = "continue"
print(action)Tool Workflow
What's Next?
Section References