"A map is a promise that every future footstep will ask you to keep."
A Loop Closure That Came Back With Receipts
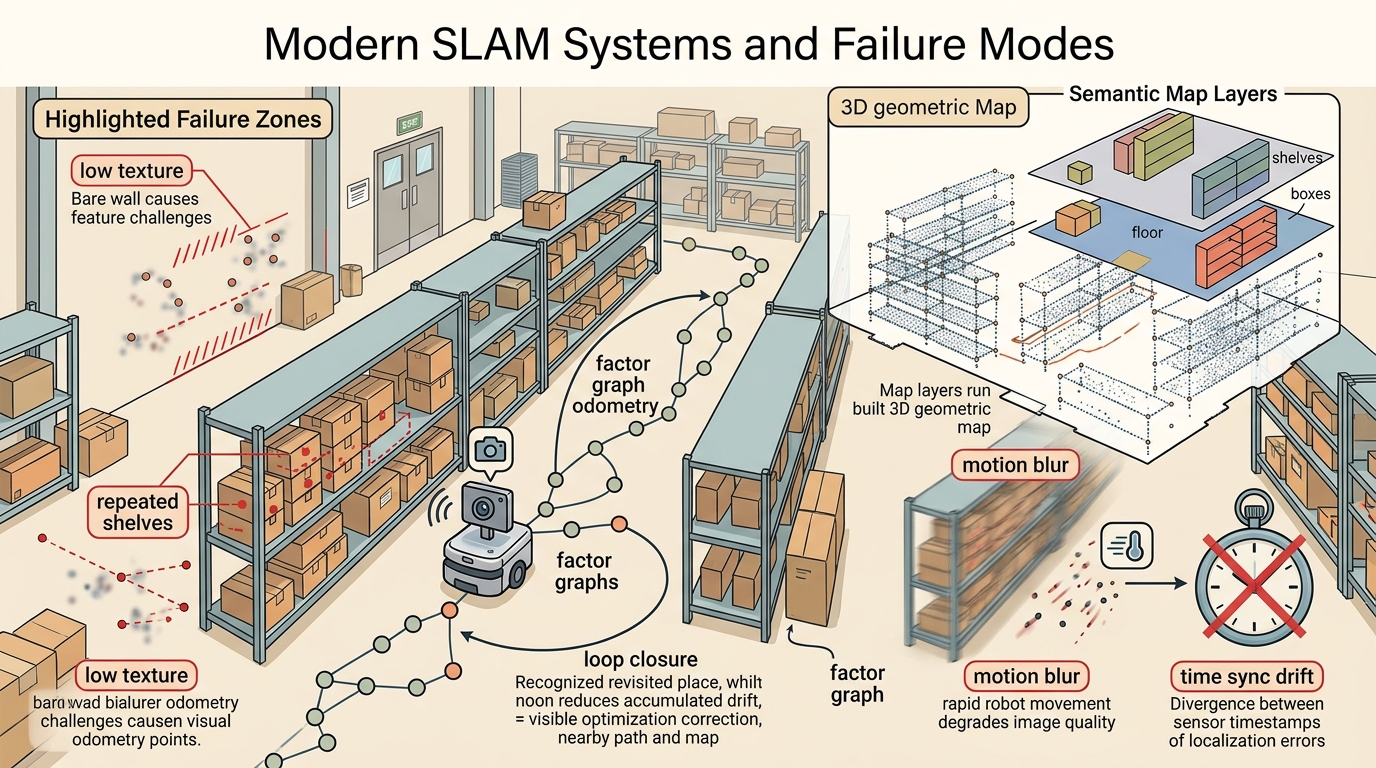
Modern SLAM systems and failure modes is the state-estimation half of embodied autonomy. The robot has partial, noisy, time-stamped evidence; it must turn that evidence into a pose, a map, and an uncertainty statement that a planner can actually trust.
Problem First
A modern SLAM system is not one algorithm. It is a contract among sensors, calibration, front-end tracking, back-end optimization, map storage, localization consumers, and replay tools.
The systems view matters because field failures often arise at interfaces: a visual-inertial front end tracks well but publishes stale transforms, a loop closure is geometrically plausible but semantically wrong, or the map is correct but too old for the current route.
A localization or mapping result is incomplete until it names the frame, timestamp, covariance or confidence, map layer, and downstream consumer. A beautiful trajectory plot with no uncertainty is not a robot interface; it is a picture.
Formal Model
The common estimator shape is a posterior over robot trajectory and map variables conditioned on controls and observations:
$$ \text{SLAM system}=(\text{sensors},\text{calibration},\text{front end},\text{back end},\text{map},\text{consumer},\text{replay}) $$
The important part is not the notation alone. The posterior says that motion increments, landmark observations, scan matches, visual features, and loop closures are all evidence terms. The estimate is strongest when each term carries a residual, a covariance model, and a replayable source record.
- Write a sensor and calibration manifest before running SLAM.
- Record front-end health: feature count, IMU residuals, scan-match score, and dropped frames.
- Record back-end health: factor residuals, loop closures, optimization time, and marginal covariance.
- Replay failures with all consumers attached: localization, planner, controller, and recovery behavior.
Worked Diagnostic
Code Fragment 1 makes the section concrete with a small numeric check. It is intentionally small, because the first debugging question is whether the estimate behaves correctly before it is hidden inside a large ROS graph or optimizer.
# Classify a SLAM failure from health signals.
# The labels separate front-end tracking from back-end graph trouble.
feature_count = 38
loop_residual_m = 2.4
optimization_ms = 180
if feature_count < 50:
label = "front_end_tracking_risk"
elif loop_residual_m > 1.0:
label = "loop_closure_outlier_risk"
elif optimization_ms > 100:
label = "back_end_latency_risk"
else:
label = "nominal"
print(label)Expected output interpretation. This label means the earliest failing signal is perceptual tracking, not graph optimization or runtime latency. The operational consequence is that recovery should first target feature quality, sensor exposure, or motion aggressiveness, rather than jumping directly to back-end tuning.
Tool Workflow
ORB-SLAM3, RTAB-Map, OpenVINS, Kimera, Cartographer-style pipelines, GTSAM, Ceres, and Nav2 cover different parts of the system. A serious build chooses tools by sensor suite, map type, latency budget, license, deployment platform, and replay needs.
Use the hand calculation as the unit test and the library stack as the maintained implementation. The right workflow is not from-scratch forever; it is from-scratch until the invariants are visible, then production tools for scale, logging, visualization, and integration.
Replay the same bag or log with one perturbation at a time: delayed timestamps, wrong frame transform, biased wheel radius, feature dropout, repeated corridor texture, moving people, or stale map cells. If the failure label cannot distinguish sensing, association, optimization, mapping, and planning, the section is not yet debug-ready.
A warehouse robot should record odometry, IMU packets, scan or feature tracks, estimated pose, covariance, active map layer, planner cost, and recovery behavior in one replay. That single artifact lets the team ask whether a route failed because the robot was lost, the map was wrong, the planner was overconfident, or the controller could not execute the command.
The strongest current systems blend classical estimation with learned features, semantics, and dense representations. The research challenge is not replacing all geometry with learning; it is deciding which learned signal can be audited when the robot fails.
SLAM is the robot version of walking into a room and saying, "I remember this place," then checking whether the memory improves the next step instead of merely sounding confident.
Can you state the state variables, observation residual, uncertainty representation, replay artifact, and most likely field failure for modern slam systems and failure modes? If one field is vague, the estimator is not ready for embodied use.
Modern SLAM systems and failure modes is production-ready only when geometry, uncertainty, timing, and action consequences are tested together.
Design a two-run replay test for this section. One run should be nominal. The other should perturb exactly one assumption, such as feature dropout, wheel slip, map aging, or delayed transforms. Report the metric, the failure label, and the action that should change.
What's Next?
Continue to Chapter 30: Navigation and Path Planning, where this state-estimation contract becomes the input to the next embodied capability.
Section References
Durrant-Whyte, H. and Bailey, T. "Simultaneous Localization and Mapping." IEEE Robotics and Automation Magazine, 2006. https://ieeexplore.ieee.org/document/1638022
Classic SLAM tutorial that frames the estimation problem and the role of uncertainty.
GTSAM Project. "Factor Graphs and GTSAM." Official documentation. https://gtsam.org/
Primary tool reference for factor graphs, smoothing, pose graphs, and robotics estimation examples.
ROS 2 Navigation Project. "Nav2 documentation." Official documentation. https://navigation.ros.org/
Primary documentation for integrating localization, maps, planners, controllers, behavior trees, and recoveries.