For Industrial Fleets, Open-RMF, AMR Interoperability, And Operations, field deployment evidence must include motors, logs, limits, monitors, and the consequence of each intervention.
A Systems-Minded Embodied AI Agent
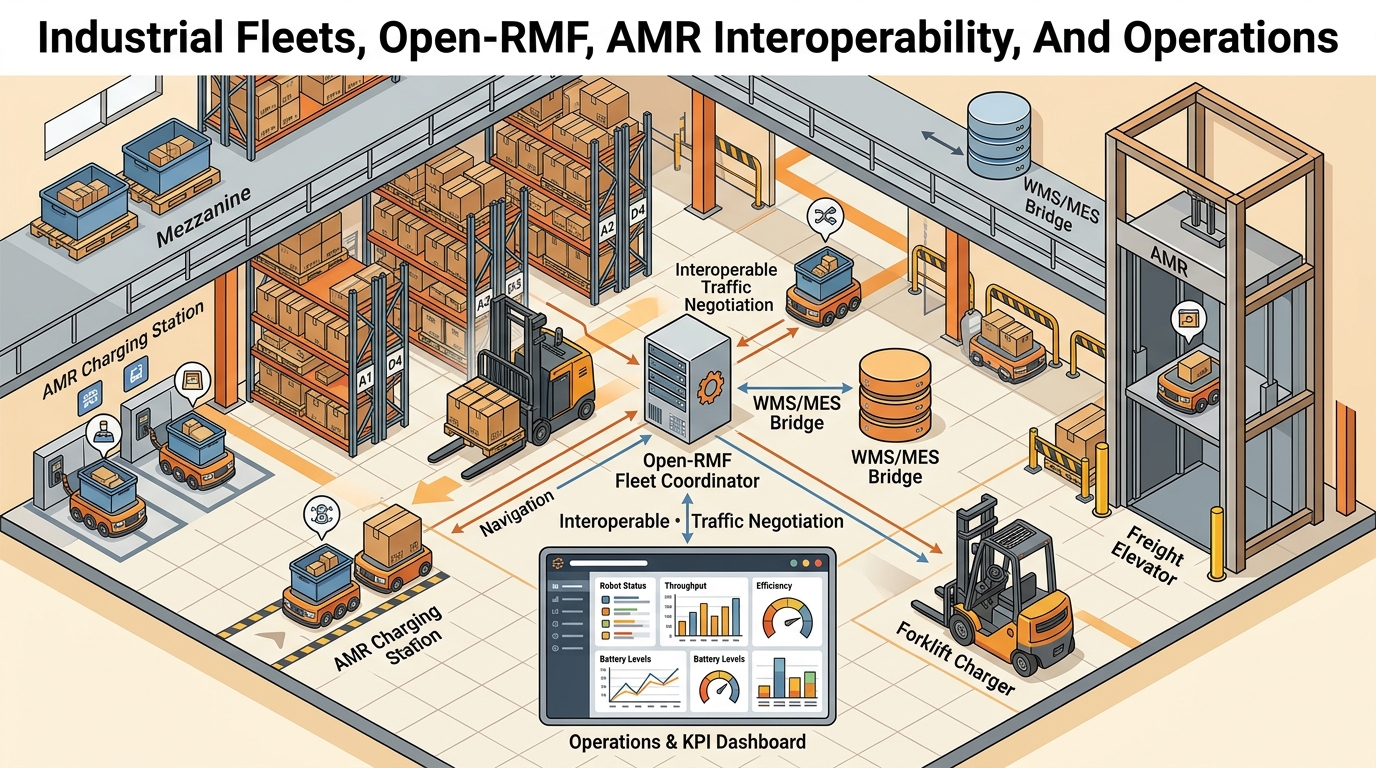
Industrial embodied AI is a fleet operations problem: maps, missions, elevators, docks, chargers, safety zones, WMS or MES events, maintenance, and incident replay must form one deployable architecture.
Why This Section Was Added
This application layer closes the gap between textbook breadth and the daily needs of researchers and builders. In industrial fleet robotics, the core question is not whether one component scores well in isolation. The question is whether the system produces an action, a safety boundary, and an evidence artifact that another team can inspect.
The central contract is compact: define the operating domain, name the state variables, state the action interface, identify the safety monitor, and save the log that proves what happened. Every serious embodied system eventually becomes this contract, whether it is a drone, an autonomous vehicle, a humanoid, a mobile manipulator, an industrial fleet, or a simulator-first research platform.
Choose the model after the evidence contract is clear. A stronger model cannot rescue missing calibration, unclear frames, unbounded actions, stale maps, or metrics computed on incompatible scenario panels.
Technical Core
For this section, the working mathematical object is:
$$KPI=(\text{throughput},\text{uptime},\text{interventions},\text{safety events},\text{SLA}).$$
The notation is intentionally a system contract rather than a single loss function. It ties the learned or planned output to state, action, environment constraints, and the measured evidence. A leading researcher can replace the simple expression with a detailed estimator, controller, simulator, or assurance argument without changing the structure of the artifact.
- Define the operating domain, robot interface, state variables, and safety constraints.
- Choose one scenario panel and keep it fixed while comparing baselines and shortcuts.
- Run the hand-built baseline and the maintained tool path on the same configuration.
- Save logs, metrics, latency, failure labels, and replay artifacts in one manifest.
- Promote the method only if the action, safety boundary, or recovery behavior improves.
Practical Stack
The practical tool stack for this section is: Open-RMF, MassRobotics AMR Interoperability, ROS-Industrial, WMS and MES bridges, ISO 3691-4, ANSI/RIA R15.08. The teaching path should start with a small inspectable baseline, then shift to maintained libraries once the mechanism is clear. The shortcut is valuable because it handles optimized kernels, standard data formats, timing integration, visualization, and deployment hooks that hand code usually handles poorly.
| Layer | What To Specify | Evidence To Save |
|---|---|---|
| Operating domain | Environment, weather or scene limits, human zones, task envelope, and excluded cases. | ODD card or site card. |
| State and actions | Frames, units, rates, uncertainty, command limits, and fallback behavior. | Interface manifest and sample logs. |
| Evaluation | Scenario panel, metric code, seeds, perturbations, and failure taxonomy. | One construct-matched result artifact. |
| Deployment | Monitoring, incident response, rollback, calibration checks, and maintenance cadence. | Safety case, incident report, and replay case. |
Stress the system with traffic deadlock, map drift, charger contention, pallet pose ambiguity, blocked dock doors, mixed human zones, elevator integration failure, and telemetry gaps. These are not edge-case decorations. They are the normal conditions that separate a publishable demo from a deployable embodied system.
Consider a warehouse fleet coordinates AMRs and autonomous forklifts across receiving, putaway, replenishment, picking, packing, and dock operations while preserving safety evidence. A useful implementation logs the observation stream, state estimate, chosen action, safety monitor status, controller status, and post-event recovery. That log keeps the team from blaming the model when the true fault is calibration, timing, planning, control, or evaluation.
# Build one application evidence card for Section 55.6.
from dataclasses import dataclass, asdict
@dataclass
class ApplicationEvidence:
section: str
operating_domain: str
state_action_contract: str
tool_stack: str
perturbation: str
metric: str
replay_artifact: str
def as_row(self) -> dict[str, object]:
return asdict(self)
card = ApplicationEvidence(
section="55.6",
operating_domain="industrial fleet robotics",
state_action_contract="frames, units, rates, limits, safety monitor",
tool_stack="Open-RMF, MassRobotics AMR Interoperability, ROS-Industrial, WMS and MES bridges, ISO 3691-4, ANSI/RIA R15.08",
perturbation="traffic deadlock",
metric="same-panel task success plus safety and recovery labels",
replay_artifact="config, log, metric output, and failure case",
)
print(card.as_row()){'section': '55.6', 'operating_domain': 'industrial fleet robotics', 'state_action_contract': 'frames, units, rates, limits, safety monitor', 'tool_stack': 'Open-RMF, MassRobotics AMR Interoperability, ROS-Industrial, WMS and MES bridges, ISO 3691-4, ANSI/RIA R15.08', 'perturbation': 'traffic deadlock', 'metric': 'same-panel task success plus safety and recovery labels', 'replay_artifact': 'config, log, metric output, and failure case'}The expected output is a fleet evidence card with stable field names that operations software, replay tools, and audit scripts can parse without guessing. In practice, seeing traffic deadlock tied to one metric line and one replay artifact tells the team whether the interoperability stack exposed congestion cleanly or hid it behind vendor-specific logs.
The hand-built evidence card is only a few lines, but production work should let Open-RMF, MassRobotics AMR Interoperability, ROS-Industrial, WMS and MES bridges, ISO 3691-4, ANSI/RIA R15.08 handle standard interfaces, logs, simulators, controllers, and visualizers. The reduction is from dozens of fragile glue-code lines to a maintained stack plus one manifest, while preserving the evidence schema.
Recipe For Builders
- Write the operating-domain card before training, tuning, or route planning.
- Choose a baseline that is simple enough to debug by eye.
- Add the maintained tool path and keep the output schema identical.
- Run one nominal case, one degraded-sensing case, one recovery case, and one safety-boundary case.
- Ship the result only with logs, configuration, metric code, and a replayable failure case.
A good embodied system makes industrial fleets, open-rmf, amr interoperability, and operations visible twice: once in the design sketch and once in the replay artifact. The second view keeps the first one honest.
Can you state the operating domain, state variables, action interface, safety monitor, perturbation, and replay artifact for industrial fleet robotics without opening another file? If not, the system is not yet specified.
The frontier is moving toward open robot foundation models, large-scale simulators, richer datasets, formal safety cases, and fleet telemetry. The durable research contribution is the evidence loop that connects those pieces without hiding assumptions.
Industrial Fleets, Open-RMF, AMR Interoperability, And Operations belongs in the book because it turns an application domain into a reproducible embodied AI build path: theory, tool stack, scenario panel, safety constraint, and replayable evidence.
design a fleet dashboard that computes throughput, intervention rate, congestion, charger use, localization drift, and safety events from one robot log artifact. Submit the result as one evidence card, one metric artifact, and one failure replay note.
Section References
Open-RMF. https://www.open-rmf.org/
Open fleet orchestration framework for multi-robot facilities.
MassRobotics AMR Interoperability Standard. https://www.massrobotics.org/what-is-the-massrobotics-amr-interoperability-standard/
Reference for cross-vendor AMR status and command interoperability.
ROS-Industrial. https://rosindustrial.org/
Industrial robotics software ecosystem.
ISO 3691-4. https://www.iso.org/standard/70660.html
Safety standard for driverless industrial trucks and systems.
ANSI/RIA R15.08. https://webstore.ansi.org/standards/ria/ansiriar15082020
Industrial mobile robot safety standard reference.
NIST ARIAC. https://www.nist.gov/el/intelligent-systems-division-73500/agile-robotics-industrial-automation-competition
Agile robotics benchmark for industrial automation tasks.